El sistema de navegación vertical (VNAV) es una parte del sistema de navegación que se incorpora en los aviones más avanzados, como el Airbus A320 o el Boeing 737. El objetivo del VNAV es predecir y optimizar las trayectorias verticales. Para ello, debe controlar la altura, trayectoria y velocidad, mediante un sistema de autothrottle (sistema que permite controlar de forma automática los ajustes de la potencia de los motores para unas características específicas del vuelo que se quiere realizar). Se trata pues de controlar para cada altura el vuelo lateral, la velocidad y ángulo pitch.
El sistema debe ir acompañado necesariamente de un sistema de navegación lateral LNAV, cuya función es determinar la trayectoria lateral entre el punto de partida y el de destino, desarrollando las órdenes de control para que el piloto automático siga la trayectoria trazada.

A partir de la trayectoria lateral y de las características del avión, se elabora un perfil vertical que tiene en cuenta restricciones de la ruta y también trata de optimizar el consumo de combustible. Otro aspecto importante es la planificación del descenso, para que sea seguro y confortable para los pasajeros. Las trayectorias verticales se optimizan teniendo en cuenta todas las restricciones del terreno o de las condiciones ambientales.
A continuación, vemos un ejemplo de trayectoria vertical de descenso, donde se muestran las indicaciones de las alturas a las que debe ir el avión.
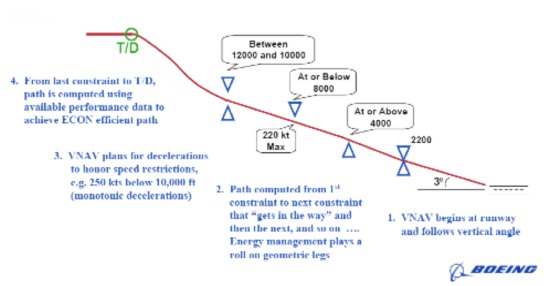
Esta información la puede usar el piloto si lo maneja en modo manual o dar lugar a órdenes de control para los servos si se utiliza el piloto automático. Las órdenes principales se dan al control de altura y al autothrottle.
El sistema VNAV recibe información de los aparatos de navegación (altímetro, medidor de velocidad, giróscopos de orientación, etc.), compara la trayectoria seguida con la deseada y desarrolla los comandos para corregir las desviaciones de la ruta trazada.
Como subsistema de VNAV y LNAV tenemos el ILS (Instrument Landing System), el cual es un sistema de control que actúa en la fase de aterrizaje (incluyendo aproximación y recorrido en pista).
Para ello hace uso de una serie de antenas localizadoras (LOC) situadas normalmente a unos 300m del final de la pista que transmiten señales portadoras entre los 108 y 112 MHz moduladas con 90Hz y 150 Hz y con distintas fases. Así, se produce un predominio de la señal de 150 Hz en la parte derecha y de 90Hz a la izquierda y el receptor mide la diferencia de modulación entre ambas señales para determinar la posición. Una diferencia cero corresponde al centro de la pista.
Además, existe una antena transmisora de la senda de planeo (GS, glideslope) que determina una ruta de descenso de aproximadamente 3° sobre la horizontal. Esta antena y las anteriores se pueden sintonizar con la misma frecuencia y sus señales se muestran en el CDI (Course Deviation Indicator).
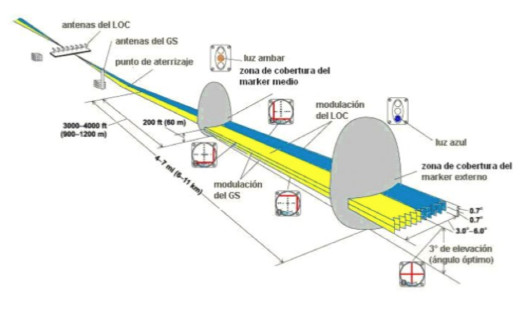
Hay tres tipos de ILS. Veremos el que corresponde al piloto automático, que es el CAT III. Éste permite operaciones a bajas altitudes de decisión (DH) y una visibilidad entre 0 y 213m, dependiendo de la certificación de la aeronave. El A/P es fundamental en casos de techo y visibilidad cero (en el que sería necesario un CAT IIIc) en los que la DH se sustituye por una altura alerta que obligaría a realizar una aproximación frustrada si el avión no estuviese bien configurado en autoaterrizaje. Por otro lado, el piloto debe supervisar en el FMA (anunciadores de modo de vuelo) que se van activando correctamente las etapas del aterrizaje (FLARE a 50ft, IDLE a 30ft, …).
Por último, el sistema también cuenta con tres radiobalizas operando a 75 MHz que indican altura y posición en la aproximación: la exterior (OM), con un indicador azul; la intermedia (MM) en amarillo; y la interior (IM) en blanco.
